Notes: Designing the IoT Wireless Network [Localization Focus]
Notes from the CWIDP book =- Chapter 6.
A system should meet the business/organization’s needs. Getting the right pieces of the puzzle is very important.
DESIGN > To conceive in the mind; invent / To plan by making a preliminary sketch / To have a goal or a purpose.
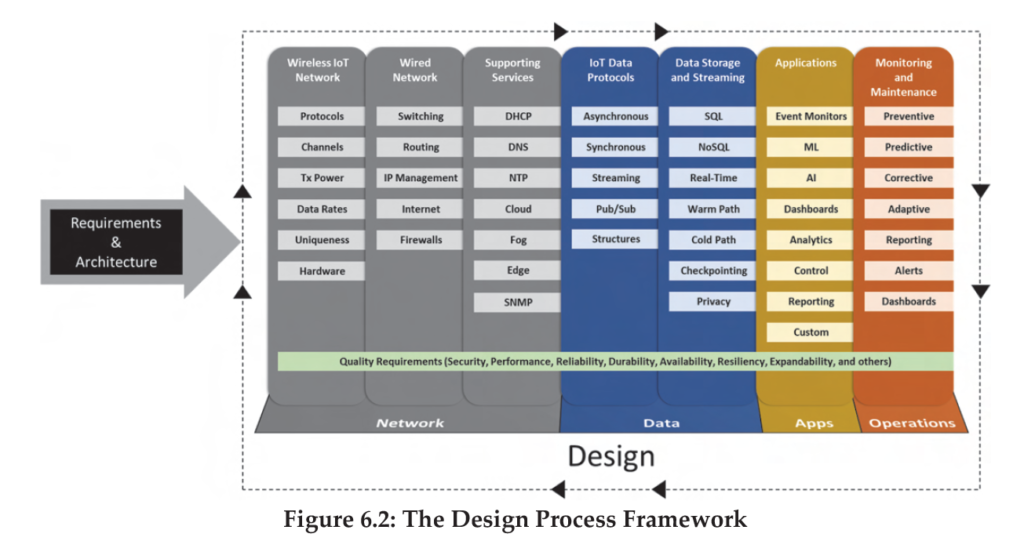
The above tasks are collected in 4 groups viz. Network, Data, Apps and Operations. CWIDP focuses on the “NETWORK” component, but the other 3 groups are in no way less important and equally critical for decisions related to the designs.
Note that one component is part of every design task/group > Quality Requirements
Security should be in consideration in every design element as it helps achieve better security overall.
The topic of “build or buy” must be addressed. Whether a design/solution is built in-house or procured from outside. If the solution does not exist today within the ecosystem building a custom IoT solution may be the only way to meet your requirements. The budget will need to be assessed. Creating a budget and timeline can be tricky with a potential for scope creep and unknowns.
Components of IoT Network Design
Hardware {End Devices} – The needs for the project/business trigger the required hardware devices. What kind of devices/how are they powered/connected to the network / need network connectivity at all times or not? Physical security.
The processing unit is the main CPU in IoT devices. They can generally get away with very low-frequency CPUs (MHz) however depends on the use case. Some devices can have an accelerating processor. The processor is dedicated to intensive tasks like signal or video processing. A storage unit is often required on all the end IoT devices to buffer/store the software and its operation. The attached sensors will transmit data to the intended physical device or the medium (on the cloud) etc. Attached actuators will receive controlling commands from the device to turn something on/off/change etc.
Actuators – An actuator is a component of a machine that produces force, torque, or displacement, usually in a controlled way, when an electrical, pneumatic or hydraulic input is supplied to it in a system.
The final component of the end device is the radio transceiver module. It is responsible for radio communications and must support the protocol desired.
Constrained-Node Network (CNN) and RFC 7228
The IETF published an informational RFC in 2014 that defines terminology for CNN. These are defined as small devices with limited CPU, memory and power resources.
Class 0 – RAM & flash less than 10KB –
Need proxies and gateways/servers to allow communication due to their sheer size and limitations.
Class 1: RAM and code size(flash) around 10KB –
Slightly better than a C0 device it may be able to only establish communication via CoAP (CoAP, a Constrained Application Protocol, is a RESTful application protocol running over UDP).
Class 2: RAM and Flash code: 50KB and 250KB respectively.
May have the ability to implement full stack network communications like a laptop or mobile device. Such devices may still be constrained and limited capabilities.
End Device Use Cases and Apps
Digital Twins: are often used to mirror physical things in a digital or virtual world. It can model a physical object in software as a complete/partial or enhanced model. Currently, Tesla employs a digital twin for every electric car to transfer real-time usage data to Giga factories. With this information, battery usage is continuously optimized to support sustainability across Tesla and all its current vehicles.
Digital Shadows: The reflection of a physical object in the form of its digital shadow has very specific uses. The best or easiest example is a user posting his/her photos on social media.
Robotics: is an area of automation and potentially IoT. It may/can be used in warehousing, industrial manufacturing, military, healthcare and in-home care. These use machine learning and AI capabilities.
UAVs (Unmanned Aerial Vehicles) – are highly mobile and require radio(cellular) connectivity for full operation in a region. One can imagine them as Drones as well and can be used for surveillance, construction, environmental monitoring, roaming gateways, power grid inspection, agriculture etc.
Gateways (Hardware)
All the devices which perform or support the function of gateways can be referenced by the term. It can be the device that lets end devices connect(eg. base station), to the internet(eg. Router/Firewall) or a Cloud provider.
Bluetooth – Gateway/Internet Gateway
ISA100.11a – Backbone Router (Uses a gateway or is a gateway)
WirelessHART – Gateway
Zigbee – Coordinator
LoRaWAN- Gateway
Sigfox Base – Station
6LoWPAN/Thread – Border Router
Most cloud providers offer options –
- HTTP-based communications with no special gateway
- MQTT(Message Queuing Telemetry Transport) – with/without special gateway
- AMQP (Advanced Message Queuing Protocol)
Protocols and Localization
It is either protocols that will determine hardware/end devices or in some circumstances, the hardware that is involved in determining the protocols.
Some of the issues include – Channel/Frequency support, Tx Power, Data Rates, Localization needs and any unique protocol requirements.
Localization is about locating the devices in physical space – whether a device is in range or out of range for communication.
Radiogoniometry – the art or science of measuring the direction from which radio waves come. Wireless localization has its roots in this term. These early technology terms are introduced to explain the in assisting localisation concepts. It is available in BLE, Wi-Fi and several others. Watch this video for further understanding of Direction finding process (NOT PART OF THE EXAM!)
Localization for IoT
aka known as location tracking/RTLS (real-time location system) or direction finding etc., depending on the protocols and technologies associated with it. GPS is one of the most familiar localization methods used by far. GPS is only cost-beneficial for high-value location tracking leading to finding other means such as BLE, Wi-Fi, RFID etc. The need for localization of the devices that will be used in IoT e.g. Livestock management (Cattle) is often the primary driver for an IoT project. Some of the KPIs include – Network Coverage, Security, Localization accuracy, and Target recovery (What if some cattle are lost or undetectable? how do address coverage holes etc.?
BLE Localization
Bluetooth low energy direction finding/localization is based on angle-of-arrival (AoA) or angle-of-departure (AoD). A detailed understanding is not expected/required for the exam purpose but one should know the difference between the 2 methods.
AoA and AoD are the angles at which one device receives the signal, but they are calculated in different ways.
In AoA, device A with a single antenna sends a special direction-finding signal to a receiving device B with multiple antennas.
Such scenarios might include:
• Asset tracking in warehouses
• Value asset tracking in hospitals, govt. establishments etc.
• ID location of people and staff
In AoD, device A with multiple antennas sends the signal using multiple antennas (array) and the receiving antenna device B receives all those signals through a single antenna.
AoD-based direction finding has some strong use cases that include smartphones and wearables.
Such scenarios might include:
• Wayfinding in large spaces such as airports, hospitals etc.
• Point of interest assistance in shopping malls, exhibitions etc.
• Search and find items such as keys, remote controls etc.
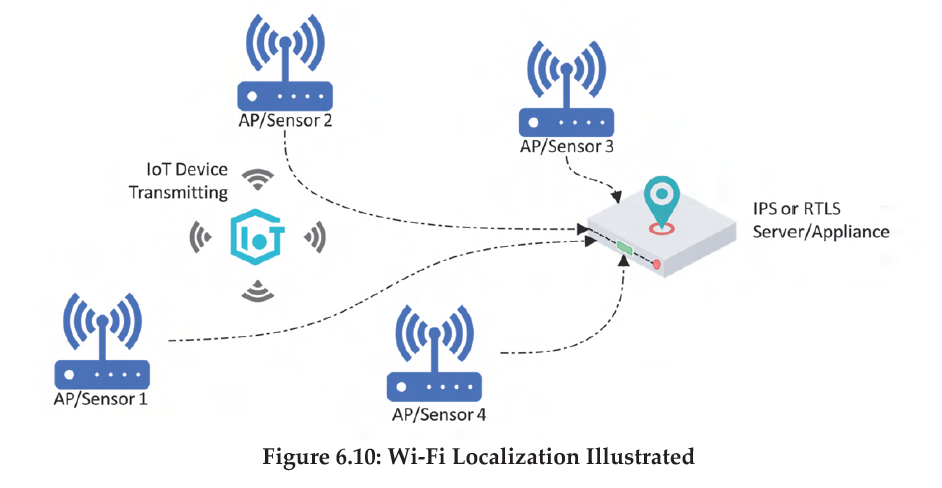
Wi-Fi Localization
Is based on centralized indoor positioning system or RTLS (Real-Time Location System) that receives signals from 802.11 AP(s) or dedicated 802.11 sensors. This is a cost effective solution as additional infrastructure is not needed and often times the sensors are included in the APs. Older PHY technologies are less accurate than newer ones.
Different methods of Wi-Fi localization include:
- RSSI Trilateration: 3 readings of the signals of the device at specific locations are intersected to approx. arrive at the device location. Also, if the transmitter and receiver are in sync, the time of arrival (ToA) may be used to determine the distance travelled from which location can be calculated.
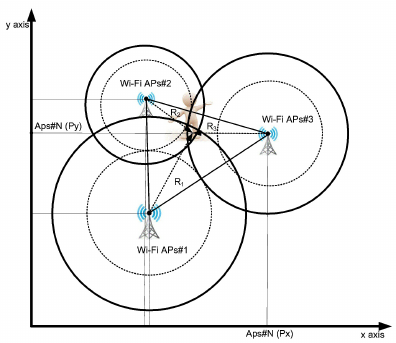
- RSSI Multilateration: Instead of time of arrival (ToA), TDoA (Time Difference of Arrival) is used to calculate the distances and is most accurate when four or more receivers are involved in the location process. This method is even more accurate than ToA.
- RSSI Fingerprinting: This technique involves creating a signature of the venue by walking around the venue step by step and recording signals at every step. By turning the venue into a grid, it is possible to create a database of different signal strengths to know which signal strengths to attribute to each spot within a building.
- Angle of Arrival (AoA): Similar to BLE but this is vendor-dependent.
- FTM (Fine Timing Measurement): Introduced in the IEEE 802.11-2016 standard uses radio frequency-based two-way time-of-flight (ToF) estimation, which promises precise indoor ranging and positioning.
RFID Localization
RFID localization is often used to simply determine that a tracked physical entity is ʺhereʺ as opposed to not here. ʺ – Is the cow there or not?
RFID is usually a sub‐1 GHz technology operating, typically, from 860 MHz to 960 MHz (UHF), 433 MHz (VHF), 13 MHz (HF), and 134 KHz (LF), depending on the regulatory
domain and application. When selecting RFID tags considerations should be made for Frequency, Use Cases and Tag size/storage along with Mounting methods.